| |
|
||||||
|
|
|||||||
|
Synthesis w.r.t. Buechi AcceptanceFunctions related to controllability and controller synthesis for non-terminating processes realised by Buechi automata. Definition of Omega-ControllabilityAddressing the control of discrete-event systems on the infinite time axis, [W2] develops the following notion of omega-controllability.
Consider two omega languages L and K
over a common alphabet Sigma,
and a set of uncontrollable events Sigma_uc ⊆ Sigma.
Then K is said to be omega-controllable w.r.t (L,Sigma_uc)
if the following conditions are satisfied:
Note 1: for omega-languages, the closure operator Closure(.) refers to the so called topological closure; see also BuechiClosure. The prefix operator Prefix(.) gives the set of all finite length prefixes. Note 2: The above definition of omega-controllability conforms to [W2] and [W3]. It must not be confused with the more general approach taken in [W4]; see also SupBuechiCon. Note 3: all omega-languages in the following discussion are assumed to be representable by finite deterministic automata with Buechi acceptance condition. Given a finite deterministic generator G, we write Bm(G) for the associated omega-language and obtain Bm(G) = B(Lm(G)) by determinism of G; see also Buechi acceptance condition. Controller Synthesis for Omega-LanguagesConsider two omega languages L and E over a common alphabet Sigma to represent the plant and the specification, respectively. Let Sigma_uc ⊆ Sigma denote the set of uncontrollable events. The task then is to find a topologically closed controller H ⊆ Sigma^w, such that
(1)
L and H are non-blocking, i.e.,
Prefix(L ∩ H) = Prefix(L) ∩ Prefix(H) ;
For any topologically closed controller H which satisfies the above conditions, the closed loop K = L ∩ H exhibits the following properties:
(a)
K is relatively topological closed w.r.t. L; and,
Note that (a) and (b) amount to omega-controllability. Moreover, if a language K satisfies (a)-(c), the controller H = Closure(K) solves the synthesis problem.
In contrast to the situation of star-languages, property (a) is in general
not retained under arbitrary union. Thus, the supremum
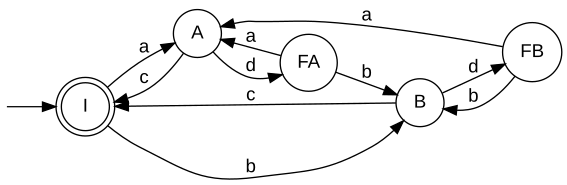
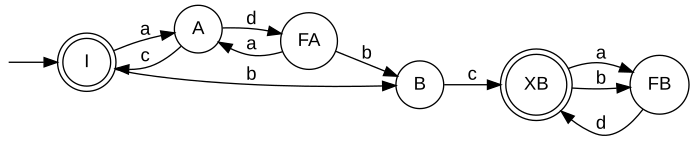
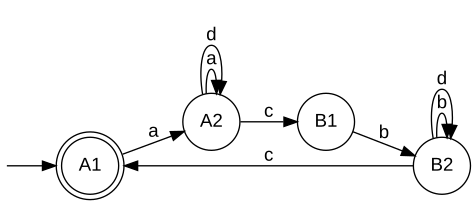
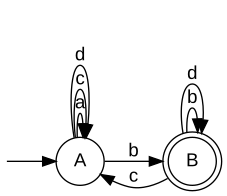
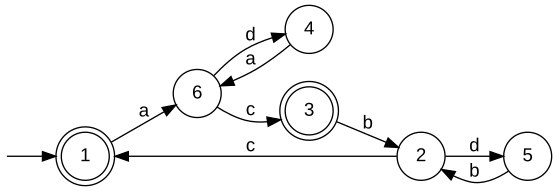
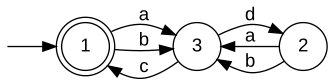
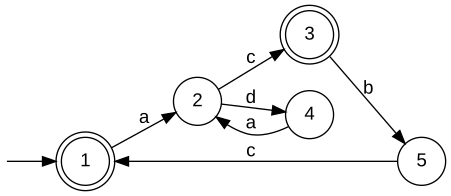
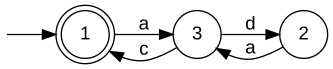
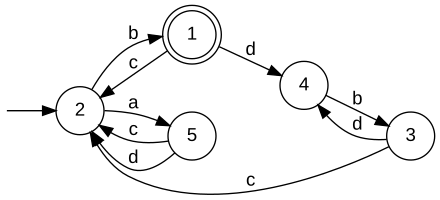
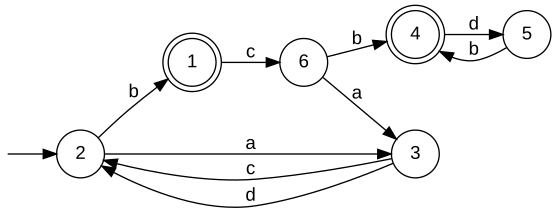
Relatively closed specificationsUnder the additional hypothesis, that E is relatively topological closed w.r.t. L, [W2] establishes that the supremum K↑ is indeed also relatively topological closed w.r.t. L, and, hence, is omega-controllable. For this case, [W3] discusses computational procedures which are very similar to the situation of star languages. For a practical solution of the control problem under the given hypothesis the Synthesis Plug-In provides the function SupConCmpl. Given realisations GSpec' and Gplant with Bm(GSpec') = Closure(E) and Bm(Gplant) = L, respectively, SupConCmpl constructs a realisation GSup of K↑, i.e., K↑ = B(GSup). When all parameters are closed, the situation further simplifies. Given realisationsn GSpec and Gplant with B(GSpec) = E and B(Gplant) = L, respectively, SupConCmplClosed constructs a realisation GSup of K↑, i.e.,K↑ = Bm(GSup). Not-necessarily relatively closed specificationsA more general approach, that drops the requirement of the specification E to be relatively closed w.r.t. the plant L is presented in [W4]. In this situation, K↑ will fail to be relatively closed, and a controller H↑ = Closure(K↑) will fail to enforce the specification. However, one could then use K↑ itself as a supervisor, provided that a technical realisation implements a mechanism that ensures that closed-loop trajectories fulfill the acceptance condition of K↑. Alternatively, one can extract a non-minimal restrictive supervisor that can be implemented by a closed behaviour. A generator that realises K↑ can be computed by SupBuechiCon, see also the example discussed below. ExampleFor illustration of omega-controllability, consider the below veriants of a machine that may run one of two processes A and B. The processes are initiated by the controllable events a and b, respectively. Once started, a process may terminate with success c or failure d. In the first variant, each process is guaranteed to eventually succeed. In the second variant, process B exhausts the machine and can subsequently only succeed after running process A. In the third variant, process B breaks the machine. Each variant exhibits an eventuality property and, hence, neither of the induced omega-languages are topologically closed.
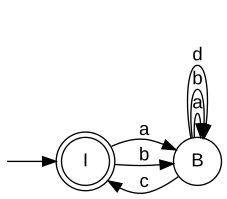
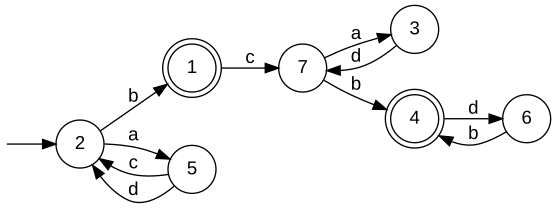
In our discussion, we consider three alternative specifications, that require the closed loop to
Note that, technically, a specification language is required to be a subset of the plant language. The above realisations are "lazy" in the sense that they do not fulfil this requirement. For the following diccussion, we think of the above specifications to be intersected with the respective plant language; see also BuechiParallel. For a minimal restrictive supervisor to exist, the specification is required to be relatively closed w.r.t. the plant. Intuitively, this is true whenever any eventuality property required by the specification is implied by the plant. The following table comments on relative closedness of indivual combinations of plant and specification.
The third row of the above table points out that there are relevant applications that do not fulfil the requirement of a relatively closed specification. This has been addressed in [W4]; see also below the documentation of SupBuechiCon. For the cases where relative closedness is satisfied, the minimal restrictive closed-loop behaviour has been computed using SupConCmpl from the Syntheis Plug-In.
IsBuechiControllableTest controllablity condition. Signature:IsBuechiControllable(+In+ Generator GPlant, +In+ EventSet ACntrl, +In+ Generator GCand, +Out+ Boolean BRes) IsBuechiControllable(+In+ System GPlant, +In+ Generator GCand, +Out+ Boolean BRes) Detailed description:This function tests omega-controllability of Bm(GCand) w.r.t. (Bm(GPlant),Sigma_uc), where the set of controllable events Sigma_uc is specified as the complement of the parameter ACntrl. The current implementation performs the test by invoking IsControllable and IsBuechiRelativelyClosed. It returns true, if both conditions are satisfied. Parameter Conditions:This implementation requires the alphabets of plant and specification to match. Furthermore, both generators must be deterministic and omega-trim. SupBuechiConOmegaAut for omega-languages. Signature:SupBuechiCon(+In+ System GPlant, +In+ Generator GSpec, +Out+ Generator GSupervisor) SupBuechiCon(+In+ Generator GPlant, +In+ EventSet AContr, +In+ Generator GSpec, +Out+ Generator GSupervisor) Detailed description:
The function SupBuechiCon addresss the
situation where the specification fails to be relatively closed w.r.t. the plant.
We formaly model the closed-loop interconnection
of a plant L ⊆ Sigma^w
and supervisor K ⊆ L by the intersection
L∩K. Since we dropped the requirement of relative closedness,
we obtain
It is readily verified that condition (c) implies condition (b). Furthermore, all three conditions are preserved under arbitrary union. Thus, given a specification E ⊆ L, there exists a supremal closed-loop behaviour K ⊆ E that satisfies conditions (a), (b) and (c). Moreover, supremal closed-loop behaviour equals the union over all omega-controllable sublanguages of E. Note. A more general approach to the control of omega-languages has been developed in [W4]. When applied to the specific case of determinitsic Buchi automata addressed here -- and despite some minor differences in the perspective we take -- the above condition (c) is equivalent to the notion of omega-controllability proposed in [W4]. There, it has been shown that the supremal controllable sublanguage can be represented in terms of the so called controllability prefix and the marking of the specification. The current of implementation SupBuechiCon is derived as an adaption of the methods proposed in [W4] (and companion papers) to the specific case at hand. Example:The following results have been obtained for the three variants of A-B-machine and the eventually-switch-to-B specification.
Parameter Conditions:This implementation requires the alphabets of plant and specification to match. Furthermore, both generators must be deterministic. Effectively, the specification is intersected with the plant. The result will be deterministic and omega-trim. libFAUDES 2.33h --- 2025.09.16 --- with "synthesis-omegaaut-observer-diagnosis-iosystem-hiosys-multitasking-coordinationcontrol-timed-iodevice-priorities-simulator-luabindings" |